As a PhD researcher and a teaching assistant at KU Leuven, I am pursuing my passion for developing innovative solutions using machine learning and signal processing.
Docker for code developement and deployement on a RaspberryPi
Intro Lately, I had to develop a demo working on a raspberrypi and send it to other project partners. However, we faced many difficulties in the beginning, since whenever I change something and push it to GitHub, they were not aware of that, and also faced problems with dependecies sometimes to make the demo work on their devices. So I decided to solve this problem and use a Docker container....
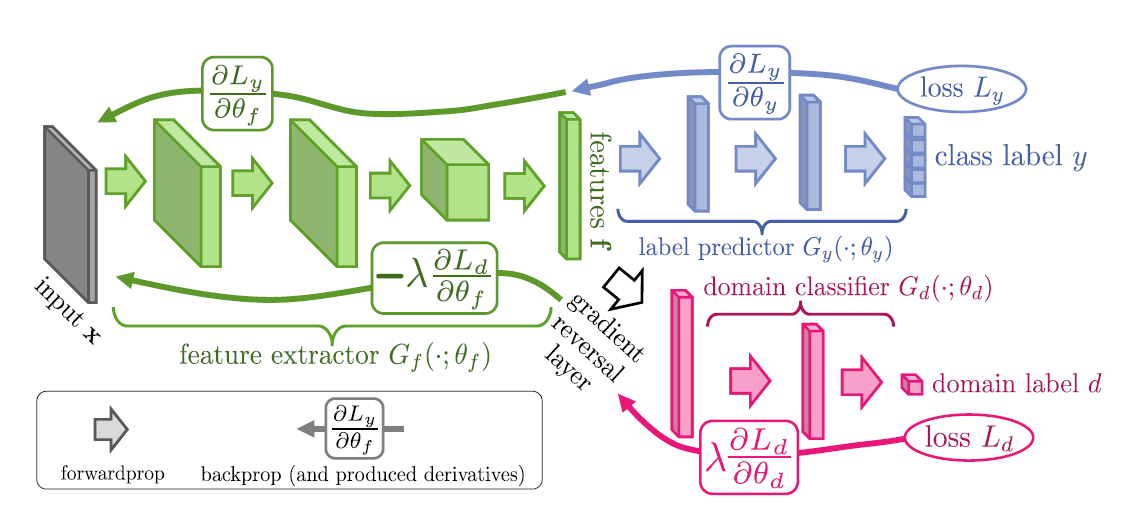
Unsupervised Domain Adaptation
Unsupervised Domain Adaptation (UDA) is a machine learning methid used to tackle the drop in performance due to a mismatch between training and testing conditions of models. Popular UDA techniques, inspired by Generative Adversarial Networks (GANs), include Domain Adversarial Neural Networks (DANNs) and Conditional Domain Adversarial Networks (CDANs) upon multiple other methods. GANs involve a game where two neural networks, the generator and the discriminator, compete against each other, with the generator creating synthetic data and the discriminator trying to distinguish between real and synthetic data, thereby improving their abilities through this adversarial process....
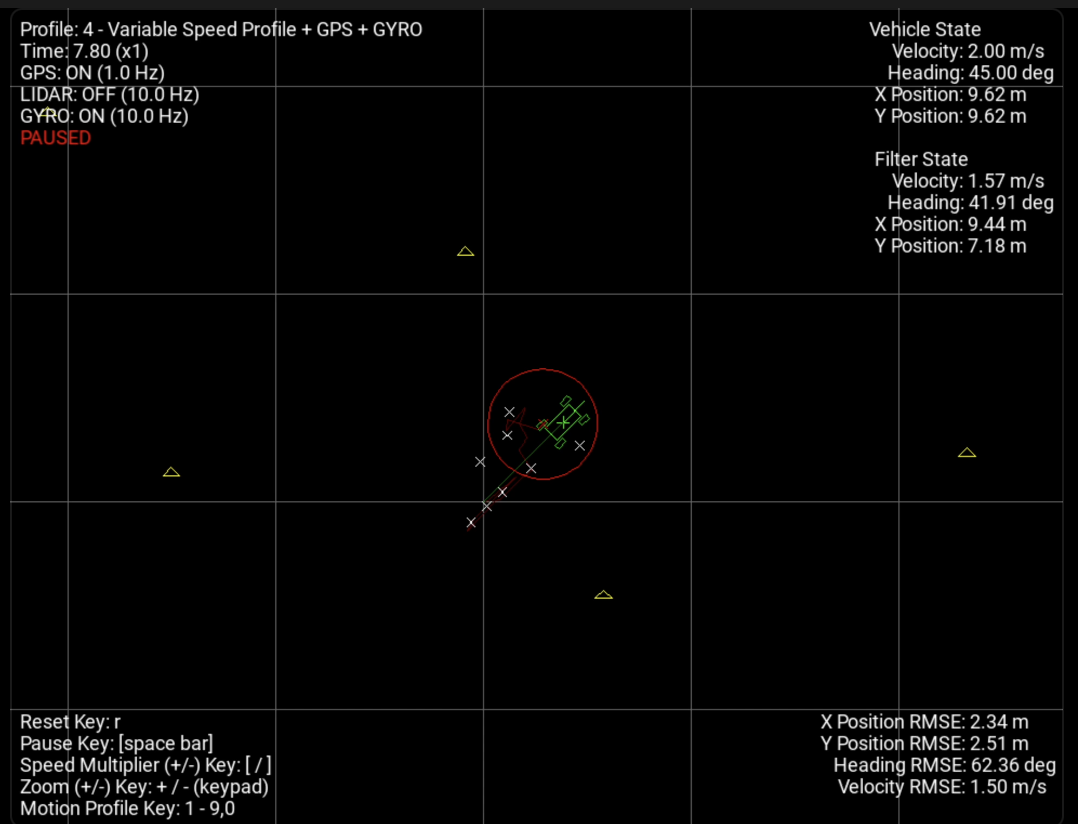
Sensor fusion using Extended Kalman Filtering
Sensor Fusion: GPS & IMU Sensor fusion between GPS and IMU data is a common technique for high accuracy positionm velocity and orientation estimation. GPS provides more accurate but less frequent position information while IMU provides more frequent acceleration and orientation data while less accurate. Sensor fusion using Kalman filtering is used to take advantage from these strengths to come up with more accurate estimates. Extended Kalman Filter Summary The Extended Kalman Filter (EKF) is an extension of the Kalman Filter used for non-linear systems....
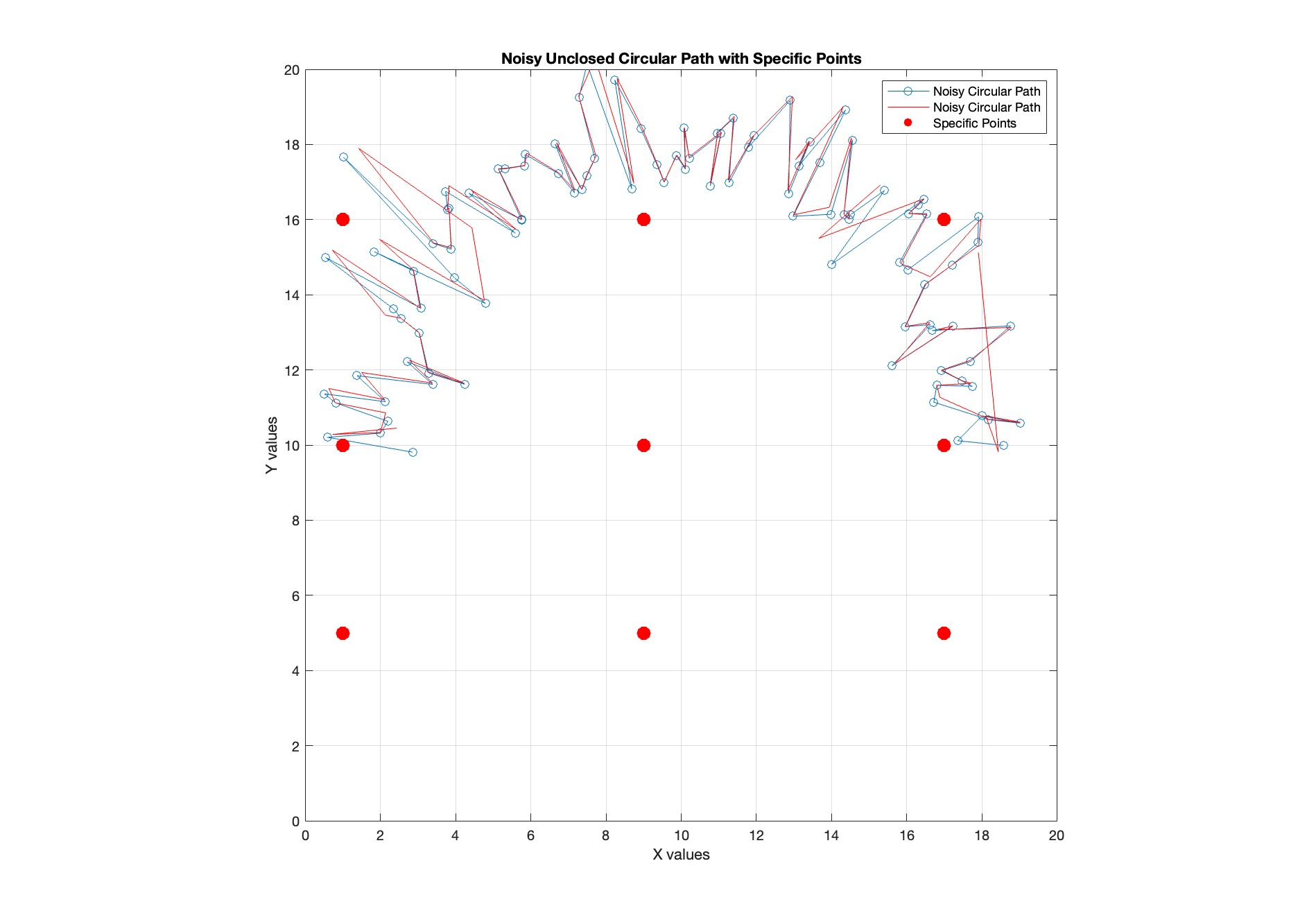
Kalman filtering: Linear, Extended
Kalman filter is a powerful algorithm used for estimating the state of a dynamic system from noisy measurements. It was developed by Rudolf Kalman in 1960 and has found applications in various fields including navigation, robotics, and signal processing. The Kalman filter works by combining two sources of information: Predictions based on a mathematical model of the system Measurements from sensors The key features of a Kalman filter include: Recursive nature: It doesn't need to store all past data, making it computationally efficient Optimal estimation: Under certain conditions, it provides the best possible estimate (Can be mathematically proven) Handling uncertainty: It accounts for both measurement and process noise Kalman filters are particularly useful in situations where the system state cannot be directly observed, but indirect and potentially imperfect measurements are available....
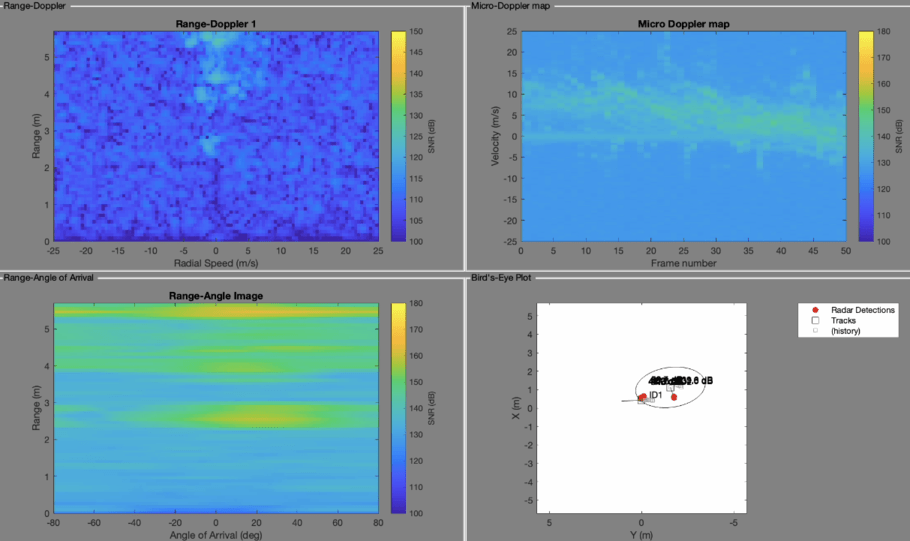
Radar signal processing for target detection and tracking
Frequency Modulated Continuous Wave Radar (FMCW) is a sensor widely used in different applications. However, processing the FMCW might be challenging at first look. In this blogpost, I will try to go over all the steps of radar signal processing. Before that, some concepts will be explained to give an idea how FMCW radar data looks like. Chirp A chirp is the signal emitted by the radar's antennas. It has a frequency that is linearly increasing with time....