Sensor fusion using Extended Kalman Filtering
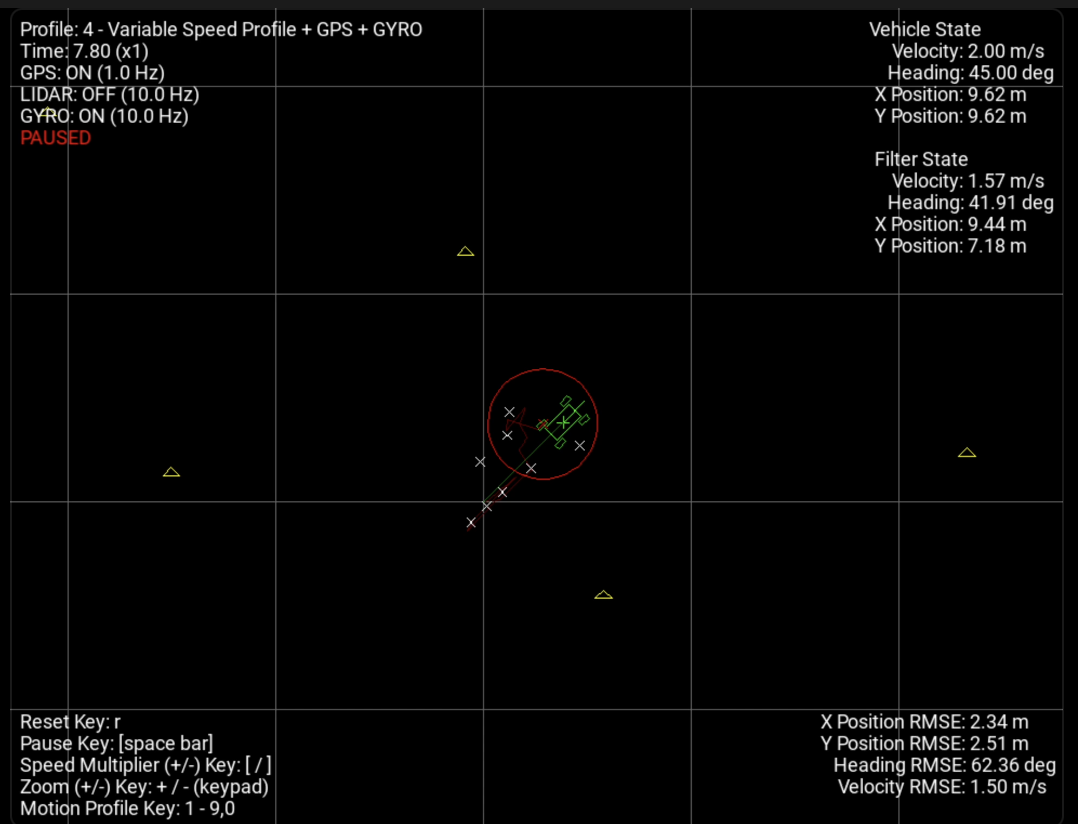
Sensor Fusion: GPS & IMU Sensor fusion between GPS and IMU data is a common technique for high accuracy positionm velocity and orientation estimation. GPS provides more accurate but less frequent position information while IMU provides more frequent acceleration and orientation data while less accurate. Sensor fusion using Kalman filtering is used to take advantage from these strengths to come up with more accurate estimates. Extended Kalman Filter Summary The Extended Kalman Filter (EKF) is an extension of the Kalman Filter used for non-linear systems....